
ROBOTIS Dynamixel AX-18A
TTL Servo Robot Actuator

Package Components
- AX-18A
- B01-HORN (assembled)
- BPF-WA/BU Set
- 3P Cable 200mm
- 16 x Bolt PHS M2x6
- 1 x Bolt PHS M3x10
- 16 x Nut M2 (N1)
Click here to jump to more pricing!
Overview:
The AX-18A servo actuator from Robotis is the next step up from the hugly popular AX-12A Servo, offering nearly twice the speed and 15% more torque! The AX-18A robot servo retains the formfactor and all of the same features of its predecessor: the ability to track its speed, temperature, shaft position, voltage, and load. As if this weren't enough, the control algorithm used to maintain shaft position on the AX-18A actuator can be adjusted individually for each servo, allowing you to control the speed and strength of the motor's response. All of the sensor management and position control is handled by the servo's built-in microcontroller. This distributed approach leaves your main controller free to perform other functions. Note: The AX-18A does NOT include mounting and bracket hardware, this is sold separately.
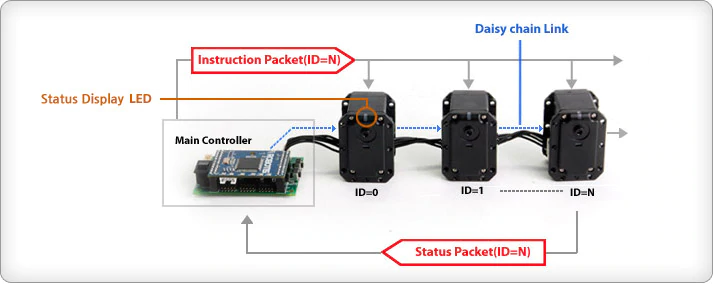
Dynamixel is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver + Network in one DC servo module.
Dynamixel AX-series are used in ROBOTIS STEM, Premium, and GP. You can easily create various types of robots such as humanoid, 4 legged and 6 legged robot with the AX-series. It can also be used as a wheel so that you can create a robot with a combination of wheel type and joint type in a single module.
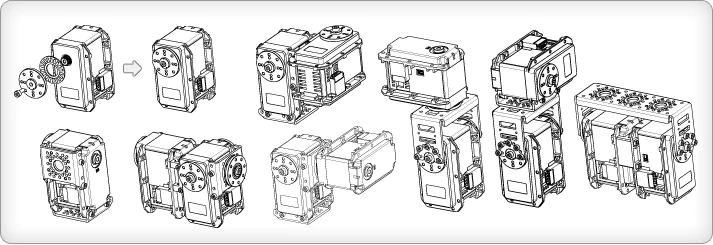
By using a variety of high-strength engineering plastic option frames or by printing frames using a 3D printer, you can produce any type of robot at a low cost.
Flexible Construction And Modular Structures
Package Components
- AX-18A
- B01-HORN (assembled)
- BPF-WA/BU Set
- 3P Cable 200mm
- 16 x Bolt PHS M2x6
- 1 x Bolt PHS M3x10
- 16 x Nut M2 (N1)
Compatible Products
- Controller: CM-5, CM-510, CM530, CM-700, OpenCM9.04(+ OpenCM485 Expansion Board), OpenCR
- Interface: USB2Dynamixel, U2D2
Factory Default Settings
- ID: 1
- Baud Rate: 1Mbps
(User can change various settings including ID and baud rate according to environment)
Caution
Only AX-series frames can be used. Optional frames for MX-series and X-series cannot be used.
Please maintain the highest limit temperature the same as the default setting value for safe usage
Solutions:
Specifications:
| Specifications | |
|---|---|
| MCU | - |
| Input Voltage | Min: 9.0V Recommended: 11.1V Max: 12.0V |
| Performance Characteristics | Voltage: 12.0V Stall Torque: 1.80N·m Stall Current: 2.2A No Load Speed: 97.0rpm No Load Current: 0.17A |
| Continuous Operation | Voltage [V]: -
Torque [N·m]: - Speed [rpm]: - Current [A]: - |
| Resolution | Resolution [deg/pulse]: 0.2930
Step [pulse]: 1,024 Angle [degree]: 300 |
| Position Sensor | Potentiometer |
| Operating Temperature | Min: -5 °C Max: 70 °C |
| Motor | Coreless |
| Baud Rate | Min: 7,843 bps Max: 1,000,000 bps |
| Control Algorithm | Compliance |
| Gear Type | Spur |
| Gear Material | Engineering Plastic and Metal |
| Case Material | Engineering Plastic |
| Dimensions (WxHxD) | 1.26 X 1.97 X 1.57 inch (32 X 50 X 40 mm) |
| Weight | 1.97oz (55.90g) |
| Gear Ratio | 254 : 1 |
| Command Signal | Digital Packet |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| Link (Physical) | TTL Level Multi Drop Bus |
| ID | 0 ~ 253 |
| Feedback | Position, Temperature, Load, Input Voltage, etc |
| Protocol version | Protocol 1.0 |
| Operating Mode / Angle | Wheel Mode:Endless turn Joint Mode:300 [deg] |
| Output | - |
| Standby Current | 50 mA |
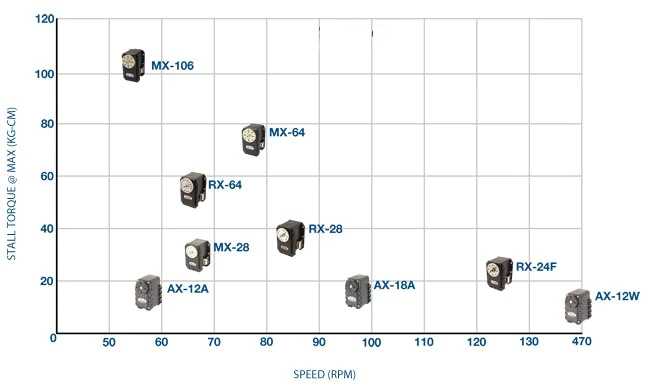
Performance Comparison:
Dynamixel SDK:
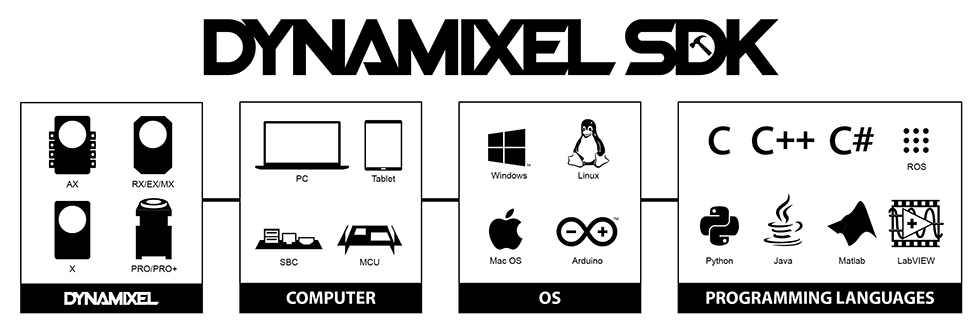
Provides various control environment just like Dynamixel
Dynamixel SDK is a software development kit that provides Dynamixel control functions using packet communication. The API of Dynamixel SDK is designed for Dynamixel actuators and Dynamixel-based platforms. You need to be familiar with C/C++ programming language for right use of the software. This e-Manual provides comprehensive information on ROBOTIS products and applications.
Supported Protocols
To control Dynamixel, communication should be established according to the protocol of Dynamixel. There are versions 1.0 and 2.0 of the Dynamixel protocol. The Dynamixel SDK supports both, and the user can use both protocols simultaneously using the Dynamixel SDK. Refer to the following manuals for details on the protocols.
- Dynamixel Protocol 1.0
- Dynamixel Protocol 2.0 (Recommended protocoltype)
Supported Devices
The Dynamixel SDK can be used on PCs such as desktops or laptops, as well as on tablets, and also on SBCs like Raspberry Pi and UpBoards. In addition, it can be used with embedded boards that support the Arduino IDE. Dynamixel uses TTL and RS485 communication. In order to use computer and Dynamixel, we recommend USB2Dynamixel or U2D2 as interface device.
Supported Operating Systems
The Dynamixel SDK supports all three operating systems: Windows, Linux, and MacOS.
Supported Languages
The Dynamixel SDK supports various programming languages: C, C++, C#, Python, Java, MATLAB and LabVIEW.
In addition, Dynamixel SDK supports ROS, so it can be used as ROS library using C++ or Python modules.
- C: *Dynamic library and source code of this library and examples
- C#, Java, MATLAB, LabVIEW: Support based on dynamic library using C language
- C++: *Dynamic library and source code of this library and examples
- Python: Python module and examples
- ROS: ROS library using C++ and Python modules
(* Dynamic library (*.dll, *.so, and *.dylib files) / .dll: dynamic-link library on Windows / .so: shared object on Linux / .dylib: dynamic library on macOS)
Video:
Pricing Notes:
- Pricing and product availability subject to change without notice.
Get a Quote!