
ROBOTIS OpenMANIPULATOR-P RM-P60-RNH
Multi-Purpose Affordable Manipulator for Research and Education

Package Components
- OpenMANIPULATOR-P
- Hard Case
- U2D2
- Spare Cables (4P, 2P)
- Screw Sets (WB M3x8 etc)
- 4P Expansion Hub
Overview:
![]()
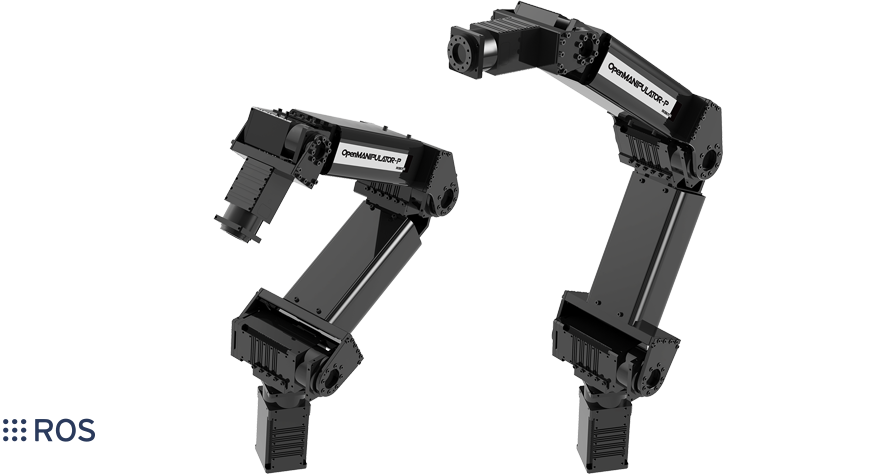
ROBOTIS provides open-source CAD, software, hardware design, and public resources for development of robotic manipulator arms.
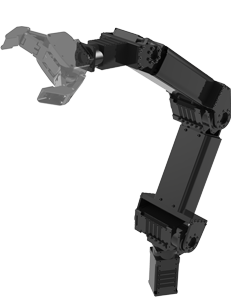
- 6 DOF (Built with DYNAMIXEL PRO PLUS)
- ROS environment for User Programming
- Modular Structure for Ease of Maintenance
- Continuous Payload Suitable for Small to Mid-scale Operations
- RS-485 Communication Bus
- Control via Computer Using USB Interface or Arduino & ROBOTIS Embedded Controllers
- User Programmable Open-Source Manipulator System
- Modular Platform for Easy Maintenance and Customization
- No External Control Box & High Weight-to-Payload Ratio

DYNAMIXEL Examples
OpenMANIPULATOR-P (RM-P60-RNH) is composed of DYNAMIXEL-P series. DYNAMIXEL has a modular form and adopts the daisy chain method. It allows users to easily add or remove joints for their own use.
Pick & Place with ROBOTIS Robot Hand (RH-P12-RN)
Dual Manipulation System
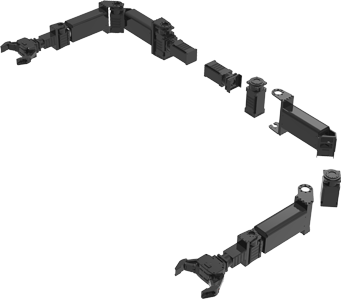
Actuator Arrangement & Mechanical Structure

Package Components
- OpenMANIPULATOR-P
- Hard Case
- U2D2
- Spare Cables (4P, 2P)
- Screw Sets (WB M3x8 etc)
- 4P Expansion Hub
Specifications:
| OpenMANIPULATOR-PRO Specifications | |
|---|---|
| Model Name | RM-P60-RNH |
| Dynamixel Pro | H54P-200-S500-R x2 H54P-100-S500-R x2 H42P-20-S300-R x2 |
| DOF | 6 |
| Payload | 3 kg |
| Repeatability | ±0.05 mm |
| Speed (Each joint, deg/sec) | 180 |
| Weight | 5.5 mm |
| Reach | 645 mm |
| Rated Voltage (VDC) | 24 V |
| Communication | RS-485 (Multi Drop Bus) |
| Software | ROS (Ubuntu Linux) |
| Controller | PC (Not Included) |
Dimensions
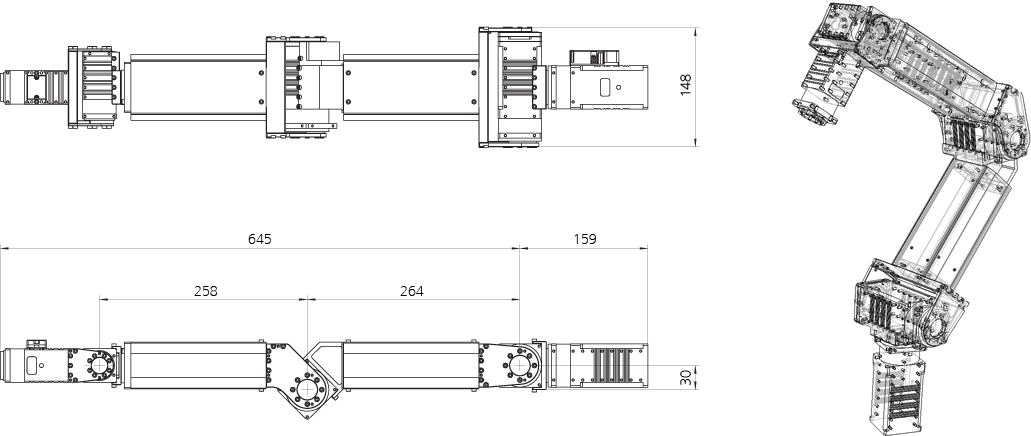
Workspace Reach and Footprint

OpenSoftware:
ROBOTIS Manipulator controller package based on integrated softwar. OpenMANIPULATOR-P (RM-P60-RNH) is based on ROS and OpenSource. Users can also control it more easily by linking it with the MoveIt! package. Even if you don’t have an actual robot, you can control the robot in the Gazebo simulator.
- OpenMANIPULATOR-P Library (Kinematics,Trajectory and Dynamixel Controller).
- GUI program package for setting and monitoring control parameters.
- MoveIt! package for OpenMANIPULATOR-P
- Simulation package based on Gazebo Simulator
- Teleoperation examples of keyboard and Joystick
