
ROBOTIS OpenMANIPULATOR-X RM-X52-TNM
Introducing the OpenManipulator Low-Cost Manipulator for ROS and Arduino
Package Components
- 5x XM430-W350-T
- Exclusive Plastic Frame Set
- 2x FR12-H101K
- 1x FR12-H104K
- 1x FR12-S101K
- 2x FR12-S102K
- 3x HN12-I101 Set
- 5x Robot Cable Set X3P (by length)
- Bolt & Nut Set
- 2 types x 2 Rubber Pad (Finger Tip)
- Phillips Screwdriver
Click here to jump to more pricing!
Overview:
![]()

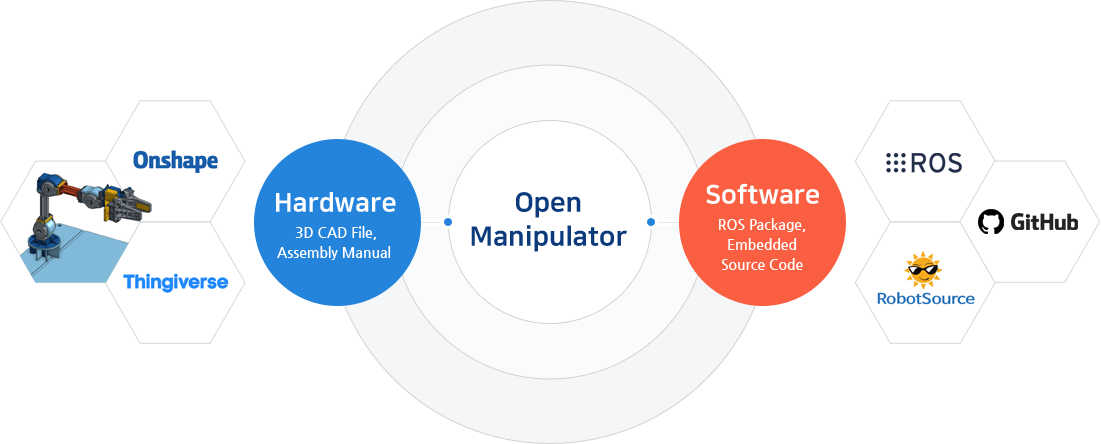
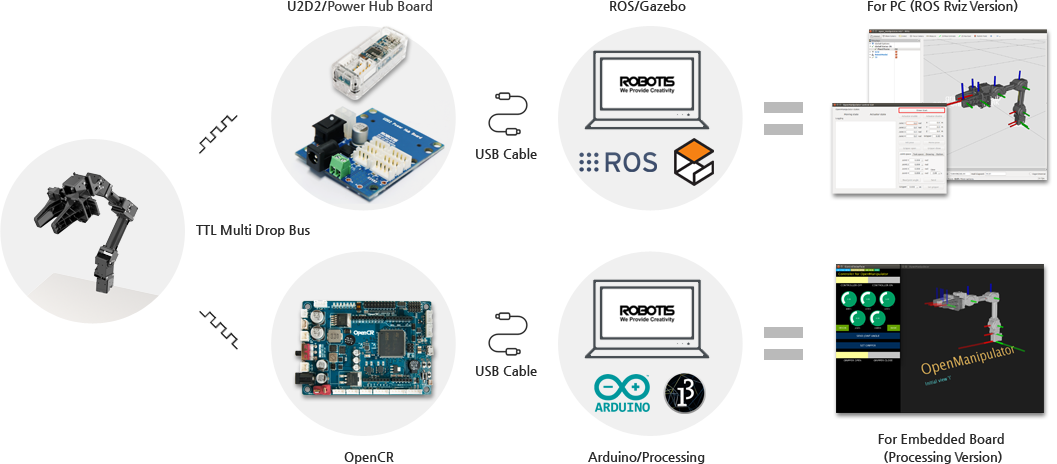
ROS-enabled OpenMANIPULATOR-X (RM-X52-TNM) is a full open robot platform consisting of OpenSoftware, OpenHardware and OpenCR(Embedded board).
- Compact open source robot based on ROS
- It has a high payload as DYNAMIXEL XM-430 model is applied.
- Easy to use with PC or mobile platform such as TB3 Waffle Pi.
- Provides source code and development environment which helps you immediately operate it with TB3 Waffle Pi
- You can freely select and use either PC or Controller e.g. OpenCR.
- Provides a variety of open source software as well as 3D drawings and CAD data for research and development.
OpenMANIPULATOR-X RM-X52-TNM is an open-hardware oriented platform. Most of the components are uploaded as STL files so that users can easily 3d print them. It also allows users to modify the length of the links or the design of the robot for their own purposes. OpenMANIPULATOR-X RM-X52-TNM is made of DYNAMIXEL-X Series which is used in TurtleBot 3.
Various Applications

Package Components
- 5x XM430-W350-T
- Exclusive Plastic Frame Set
- 2x FR12-H101K
- 1x FR12-H104K
- 1x FR12-S101K
- 2x FR12-S102K
- 3x HN12-I101 Set
- 5x Robot Cable Set X3P (by length)
- Bolt & Nut Set
- 2 types x 2 Rubber Pad (Finger Tip)
- Phillips Screwdriver
*These items are NOT included:
- Power Supply: SMPS 12V 5A
- Controller: OpenCR or PC
- Interface: U2D2
- Base Plate-02
Please purchase separately.
Specifications:
| OpenMANIPULATOR-X Specifications | |
|---|---|
| Model Name | RM-X52 |
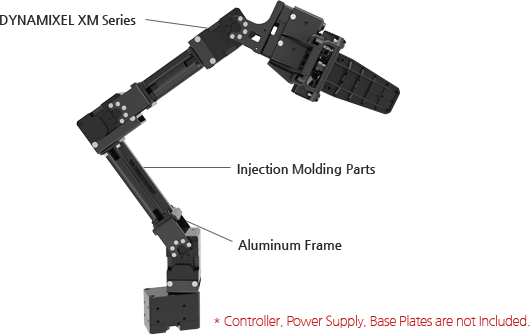
| Actuator | XM430-W350-T |
| Power Supply (sold separately) | 12V |
| Freedom of Degree | 5 (4DOF + 1DOF Gripper) |
| Payload | 500g |
| RPM (joint) | 46RPM |
| Weight (assembly) | 0.70 kg (1.54 lbs) |
| Length | 380 mm (14.9 inch) |
| Gripper stroke | 20~75 mm (0.79~2.95 inch) |
| Interface | TTL Level Multi Drop BUS |
| Software | ROS. DYNAMIXEL SDK, Arduino, Processing |
| Controller (sold separately) | PC, OpenCR |
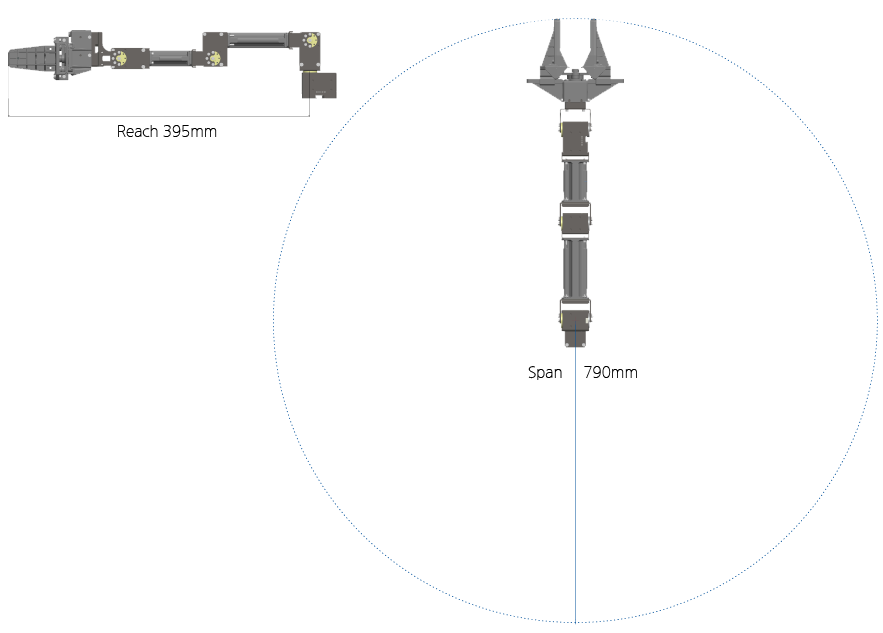
Dimensions

Workspace Reach and Footprint
Package Contents:

Compare:
| OpenManipulator | Industrial | Competitor | |
|---|---|---|---|
| Interface | |||
| ROS(gazebo, Movelt!) | ○ | △ | Χ |
| Arduino IDE | ○ | Χ | △ |
| Motor Control | |||
| Position Control | ○ | ○ | ○ |
| Current Control | ○ | △ | Χ |
| Hardware Customizing | |||
| Interchangeable End-Effector | ○ | ○ | ○ |
| Expandable DOF | ○ | Χ | Χ |
| Compatible with Mobile platform | ○ | △ | △ |
| Software Customizing | |||
| Kinematics | ○ | Χ | Χ |
| Motor Controller | ○ | Χ | Χ |
| Trajectory | ○ | △ | Χ |
| Application | |||
| Pick and place | ○ | ○ | ○ |
| Teleoperation | ○ | ○ | ○ |
| Camera Application | ○ | ○ | ○ |
OpenSoftware:
OpenMANIPULATOR-X RM-X52-TNM are based on ROS and OpenSource. ROS official hardware platform,TurtleBot series has been supporting ‘TurtleBot Arm’. The OpenMANIPULATOR-X RM-X52-TNM has full hardware compatibility with TurtleBot3. Users can also control it more easily by linking it with the MoveIt! package. Even if you do not have an actual robot, you can control the robot in the Gazebo simulator.
Video:
ROBOTIS OpenMANIPULATOR 01: Chain
ROBOTIS OpenMANIPULATOR 18: Teaching Demo
OpenManipulator-X Frame Set (RM-X52):

Features:
- This product is a frame set which can make X430 based OpenManipulator-X.
- You can assemble an OpenManipulator (4 DOF Arm + 1 DOF Gripper), which is the same as OpenManipulator-X (RM-X52-TNM).
- DYNAMIXEL X430 is not included so you can select a suitable DYNAMIXEL model considering payload.
- XH430, XM430 and XL430 are all compatible with this frame and can be also mixed.
- You can make an OpenManipulator-X with your desired specification and can fix it on Base Plate-02 or attach it to TB3 Waffle Pi.
Package Component:
- Exclusive Plastic Frame Set
- 2x FR12-H101K
- 1x FR12-H104K
- 1x FR12-S101K
- 2x FR12-S102K
- 3x HN12-I101 Set
- 5x Robot Cable Set X3P (by length)
- 1x Bolt & Nut Set
- 2 types x 2 Rubber Pad (Finger Tip)
- 1x Phillips Screwdriver
- 3x Allen Wrench (by type)
Caution:
- DYNAMIXEL, power supply, and controller are not included. Please purchase separately.
- When selecting DYNAMIXEL X430 model, the appropriate model should be selected considering communication method and target specification (payload)
- XL430 Single-model configuration is not recommended as it might be short of output.
- When mixing XL430 with XH / XM430, they (XH / XM430) must be TTL communication model.
- When you use XH430-V-series (24V model), you must configure your OpenManipulator as a single 24V model.
- AX / MX series, X540 series, and PRO series cannot be used.
- The assembly manual is not included, but you can download the PDF file on online for free. (Refer to below link)
Package Contents:

Pricing Notes:
- Pricing and product availability subject to change without notice.