
ROBOTIS Dynamixel XC430-W150-T
Dynamixel-X TTL Servo Robot Actuator

Sorry, this product is no longer available, Please contact us for a replacement.
Overview:
Dynamixel is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver + Network in one DC servo module.
The Dynamixel XC series adopts new features that allow 360 degrees control mode with its contactless magnetic encoder and hollow back case assembly structure. The XL series has the same mechanical structure as the XM430 and XH430 and is compatible with the respective models.
XC430 is a high performance version of XL430 (Entry-level Dynamixel), that can be applied to robots that require stronger torque.
- Various Operating Modes: Velocity Control, Position Control, Extended Position Control, PWM Control
- Profile Control for Smooth Motion Planning
- Hollow Back Case Minimizes Cable Stress (3-way-routing)
- Direct Screw Assembly to the Case (without Nut Insert)
- Energy Saving with Reduced Current
Package Components
- XC430-W150-T
- HN11-N101 (Pre-assembled)
- Robot Cable-X3P 180mm
- 5 x Bolt M2.6x5 TAP
- 5 x Bolt M2x5
- 5 x Bolt PHS M2.5x14
- 5 x Spacer
* Not included Idler Set for assembling hinge frames
Compatible Products
- Controller: OpenCM9.04 485 Expansion Board, OpenCR1.0
- Interface: USB2Dynamixel, U2D2
Factory Default Settings
- ID: 1
- Baud Rate: 57600bps
(User can change various settings including ID and baud rate according to environment)
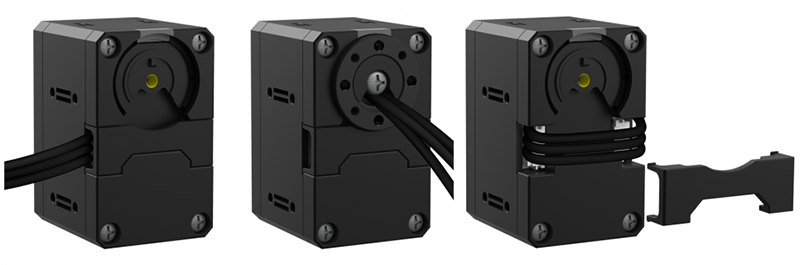
Various Cabling Methods
Caution
Dynamixel-X Series cable assembly through hollow case
Organize the entangled cable before assembling the back case. Do not assemble the back case with entangled cable. The entangled cable can be squashed by the case and cause communication error.
If you use two cables through the hollow case, the cables will be damaged. Use only one cable through the hollow case.
The Dynamixel-X Series adopted a new gold-plated JST connector for secure and reliable communication. The connector used for previous Dynamixel is Molex.
To control Dynamixel-X Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model. Please purchase a convertible cable when using a controller and interface that supports the JST connector.
Features:
Basic Features
- Improved Torque, Compact Size
- Enhanced Durability and Expandability
- Hollow Back Case Minimizes Cable Stress (3-way-routing)
- Direct Screw Assembly to the Case (without Nut Insert)
- Improved Heat Sink Featuring an Aluminum Case
Various Control Functions
- 6 Operating Modes
- Current-Based Torque Control (4096 steps, 2.69mA/step)
- Profile Control for Smooth Motion Planning
- Trajectory Data and Moving Status (In-Position, Following Error, etc.)
- Energy Saving (Reduced Current from 100mA to 40mA)

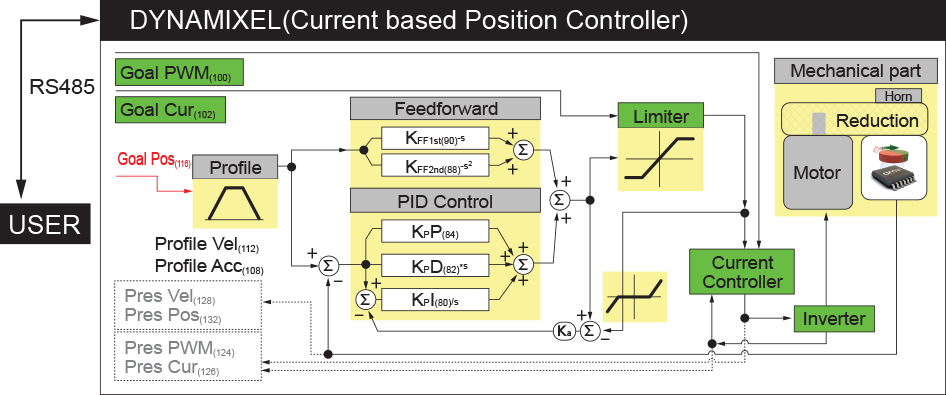
Sophisticated Control Architecture:
- Various feedback and control method according to developers’ needs
- Protocol 2.0 provides reliable packet communication
Specifications:
| Specifications | |
|---|---|
| MCU | Cortex-M3 (72 Mhz, 32 bit) |
| Input Voltage | Min: 10.0V Recommended: 12.0V Max: 14.8V |
| Performance Characteristics | Voltage: 12.0V Stall Torque: 1.60N·m Stall Current: 1.4A No Load Speed: 106.0rpm No Load Current: 0.06A |
| Continuous Operation | Voltage: - Torque: - Speed: - Current: - |
| Resolution | Resolution [deg/pulse]: 0.0879 Step [pulse]: 4,096 Angle [degree]: 360 |
| Position Sensor | Contactless Absolute Encoder (12Bit, 360 [deg]) Maker : ams (www.ams.com), Part No : AS5045 |
| Operating Temperature | Min: -5 °C Max: 80 °C |
| Motor | Coreless |
| Baud Rate | Min: 9,600 bps Max: 4,500,000 bps |
| Control Algorithm | PID |
| Gear Type | Spur |
| Gear Material | Metal |
| Case Material | Engineering Plastic |
| Dimensions (WxHxD) | 1.12 x 1.83 x 1.34 inch (28.5 x 46.5 x 34.0 mm) |
| Weight | 2.29oz (65.00g) |
| Gear Ratio | 159.5 : 1 |
| Command Signal | Digital Packet |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) |
| Link (Physical) | TTL Level Multi Drop Bus |
| ID | 0 ~ 252 |
| Feedback | Position, Velocity, Load, Realtime tick, Trajectory, Temperature, Input Voltage, etc |
| Protocol version | Protocol 1.0 Protocol 2.0(Default) |
| Operating Mode / Angle | Velocity Control mode: Endless turn Position Control Mode: 360 [deg] Extended Position Control Mode: ±256 [rev] PWM Control Mode: Endless turn |
| Output | - |
| Standby Current | 46 mA |
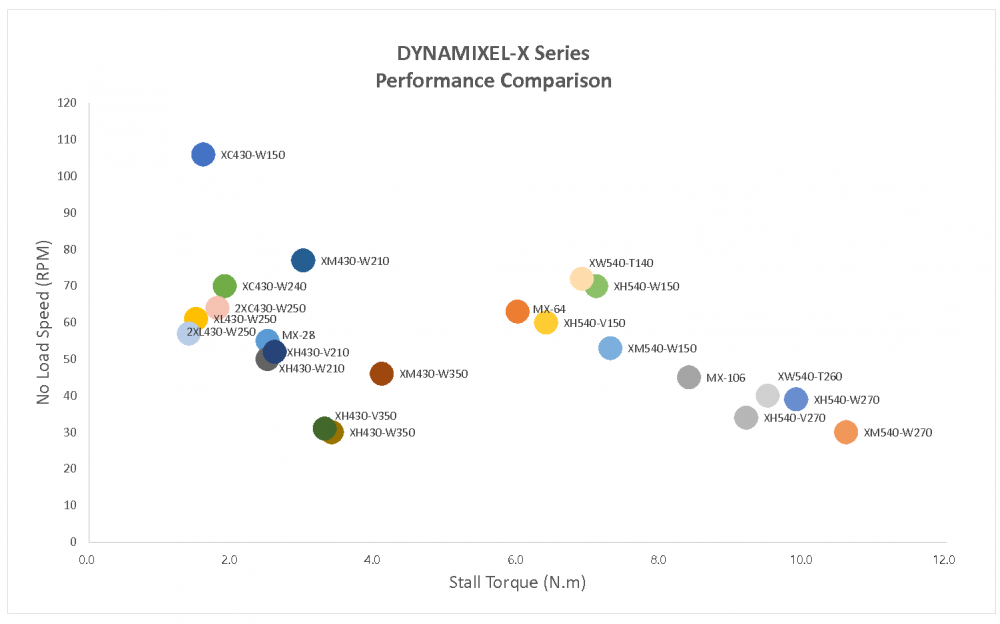
Performance Comparison:
Dynamixel SDK:
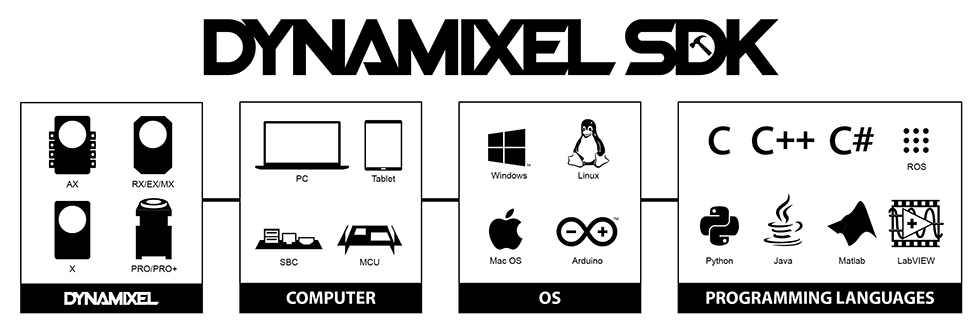
Provides various control environment just like Dynamixel
Dynamixel SDK is a software development kit that provides Dynamixel control functions using packet communication. The API of Dynamixel SDK is designed for Dynamixel actuators and Dynamixel-based platforms. You need to be familiar with C/C++ programming language for right use of the software. This e-Manual provides comprehensive information on ROBOTIS products and applications.
Supported Protocols
To control Dynamixel, communication should be established according to the protocol of Dynamixel. There are versions 1.0 and 2.0 of the Dynamixel protocol. The Dynamixel SDK supports both, and the user can use both protocols simultaneously using the Dynamixel SDK. Refer to the following manuals for details on the protocols.
- Dynamixel Protocol 1.0
- Dynamixel Protocol 2.0 (Recommended protocoltype)
Supported Devices
The Dynamixel SDK can be used on PCs such as desktops or laptops, as well as on tablets, and also on SBCs like Raspberry Pi and UpBoards. In addition, it can be used with embedded boards that support the Arduino IDE. Dynamixel uses TTL and RS485 communication. In order to use computer and Dynamixel, we recommend USB2Dynamixel or U2D2 as interface device.
Supported Operating Systems
The Dynamixel SDK supports all three operating systems: Windows, Linux, and MacOS.
Supported Languages
The Dynamixel SDK supports various programming languages: C, C++, C#, Python, Java, MATLAB and LabVIEW.
In addition, Dynamixel SDK supports ROS, so it can be used as ROS library using C++ or Python modules.
- C: *Dynamic library and source code of this library and examples
- C#, Java, MATLAB, LabVIEW: Support based on dynamic library using C language
- C++: *Dynamic library and source code of this library and examples
- Python: Python module and examples
- ROS: ROS library using C++ and Python modules
(* Dynamic library (*.dll, *.so, and *.dylib files) / .dll: dynamic-link library on Windows / .so: shared object on Linux / .dylib: dynamic library on macOS)
Views:

Video:
Pricing Notes:
- Pricing and product availability subject to change without notice.