
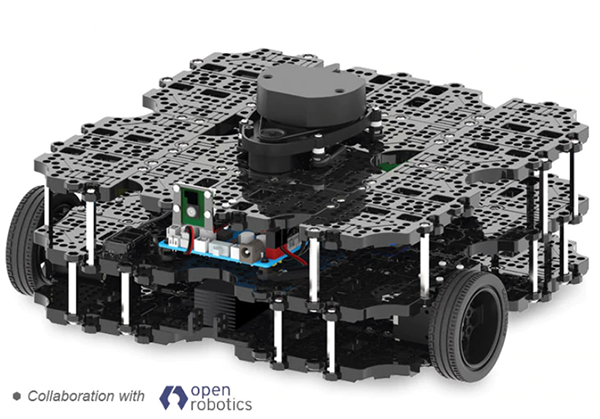
ROBOTIS TurtleBot3 Waffle Pi
AI Research Starts Here ROS Official Platform

This product is no longer available.
Please Contact us for more information.
Package Components
- 360° LiDAR for SLAM & Navigation
- Scalable Structure
- Single Board Computer (Raspberry Pi)
- Raspberry Pi Camera for Perception
- OpenCR (32-bit ARM Cortex-M7)
- Bluetooth Module for Remote Controller
- DYNAMIXEL x 2 for Wheels
- Sprocket Wheels for Tire and Caterpillar
- Li-Po Battery 11.1V 1,800mAh
Overview:
![]()
TurtleBot3 is a new generation mobile robot that’s modular, compact and customizable. Let's explore ROS and create exciting applications for education, research and product development.
TurtleBot3 is a small, affordable, programmable, ROS-based mobile robot for use in education, research, hobby, and product prototyping. The goal of TurtleBot3 is to dramatically reduce the size of the platform and lower the price without having to sacrifice its functionality and quality, while at the same time offering expandability. The TurtleBot3 can be customized into various ways depending on how you reconstruct the mechanical parts and use optional parts such as the computer and sensor. In addition, TurtleBot3 is evolved with cost-effective and small-sized SBC that is suitable for robust embedded system, 360 degree distance sensor and 3D printing technology.
The TurtleBot3’s core technology is SLAM, Navigation and Manipulation, making it suitable for home service robots. The TurtleBot can run SLAM (simultaneous localization and mapping) algorithms to build a map and can drive around your room. Also, it can be controlled remotely from a laptop, joypad or Android-based smart phone. The TurtleBot can also follow a person’s legs as they walk in a room. Also the TurtleBot3 can be used as a mobile manipulator capable of manipulating an object by attaching a manipulator like OpenMANIPULATOR. The OpenMANIPULATOR has the advantage of being compatible with TurtleBot3 Waffle and Waffle Pi. Through this compatibility can compensate for the lack of freedom and can have greater completeness as a service robot with the the SLAM and navigation capabilities that the TurtleBot3 has.
Features:

World’s Most Popular ROS Platform
TurtleBot is the most popular open source robot for education and research.

Affordable Cost
TurtleBot was developed to meet the cost-conscious needs of schools, laboratories and companies.

Small Size
Imagine keeping TurtleBot3 in your backpack and develop your program and test it anywhere you go.

Extensibility
Extend your ideas beyond imagination with various SBC, sensors and motors on a scalable structure.

Modular Actuator
Easy to assemble, maintain, replace and reconfigure.

Open Source Software
Variety of open source software for the user. You can modify downloaded source code and share it with your friends.

Open Source Hardware
Schematics, PCB Gerber, BOM and 3D CAD data are fully opened to the user.

Strong Sensor Lineups
High utilized Raspberry Pi Camera, Enhanced 360° LiDAR, 9-Axis Inertial Measurement Unit and precise encoder for your robot.
Specifications:
| TurtleBot3 Waffle Pi Specifications | |
|---|---|
| Maximum translational velocity | 0.26 m/s |
| Maximum rotational velocity | 1.82 rad/s (104.27 deg/s) |
| Maximum payload | 30kg |
| Size (L x W x H) | 281mm x 306mm x 141mm |
| Weight (+ SBC + Battery + Sensors) | 1.8kg |
| Threshold of climbing | 10 mm or lower |
| Expected operating time | 2h |
| Expected charging time | 2h 30m |
| SBC (Single Board Computers) | Raspberry Pi 3 Model B and B+ |
| MCU | 32-bit ARM Cortex-M7 with FPU (216 MHz, 462 DMIPS) |
| Remote Controller | RC-100B + BT-410 Set (Bluetooth 4, BLE) |
| Actuator | XL430-W210 |
| LDS (Laser Distance Sensor) | Raspberry Pi 3 360° Laser Distance Sensor LDS-01 (360°LiDAR) |
| Camera | Raspberry Pi Camera Module v2.1 |
| IMU | Gyroscope 3 Axis Accelerometer 3 Axis Magnetometer 3 Axis |
| Power connectors | 3.3V / 800mA 5V / 4A 12V / 1A |
| Expansion pins | GPIO 18 pins Arduino 32 pin |
| Peripheral | UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 |
| DYNAMIXEL ports | RS485 x 3, TTL x 3 |
| Audio | Several programmable beep sequences |
| Programmable LEDs | User LED x 4 |
| Status LEDs | Board status LED x 1 Arduino LED x 1 Power LED x 1 |
| Buttons and Switches | Push buttons x 2, Reset button x 1, Dip switch x 2 |
| Battery | Lithium polymer 11.1V 1800mAh / 19.98Wh 5C |
| PC connection | USB |
| Firmware upgrade | via USB / via JTAG |
| Power adapter (SMPS) | Input : 100-240V, AC 50/60Hz, 1.5A @max Output : 12V DC, 5A |
| Single Board Computers | ||
|---|---|---|
Raspberry Pi Model B
|
Raspberry Pi Camera Module V2
|
360°LiDAR
|




Views:

Package Contents:

Functions:
